
![]()
!sudo apt install tree
1.0 Intro
In this tutorial, we’ll create an end to end pipeline for image multiclass classification using Pytorch. We will use the Boat Dataset from Kaggle to classify images of 5 types of boats. We will go over the steps of dataset preparation, data augmentation and then the steps to train a convolutional neural network using transfer learning.
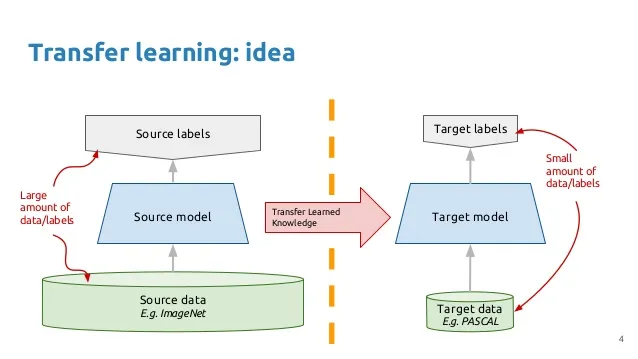
As you might know, very few people train an entire Convolutional Network from scratch, because it is required a big dataset and also, it has a hight computational cost. Instead, what you can do is get a pretrain ConvNet model who was trained on a very large dataset (e.g. ImageNet, which contains 1.2 million images with 1000 categories), and then use the ConvNet either as an initialization or a fixed feature extractor for the task of interest. This technique is called Transfer Learning.
There are two Transfer Learning approachs:
- Finetuning the ConvNet: Instead of random initialization. We initialize the network with a pretrained network, like the one that is trained on imagenet 1000 dataset. The rest of the training looks as usual.
- ConvNet as fixed feature extractor: Here, we will freeze the weights for all of the network except that of the final fully connected layer. This last fully connected layer is replaced with a new one with random weights and only this layer is trained.
In this tutorial we’ll try both and compare their results.
2.0 Load Libraries
Here we load the main libraries we are going to work with.
%matplotlib inline
import numpy as np
import pandas as pd
from glob import glob
import time
import os
import copy
import shutil
import matplotlib.pyplot as plt
import seaborn as sns
from sklearn.model_selection import train_test_split
from sklearn.metrics import confusion_matrix
from tqdm.notebook import tqdm
import torch
from torch import nn
from torchvision import datasets
from torch.utils.data import DataLoader
from torchvision import models
from torch import optim
from torchvision import transforms
from torchvision.datasets import ImageFolder
from torch.utils.data import Dataset
from PIL import Image
import warnings
warnings.filterwarnings("ignore")
3.0 Download and process datasets
Following these steps, it will download the images and make the necessary folders that will allow us to go through the tutorial.
Note: You might need a kaggle’s account and download the key.
from google.colab import files
files.upload()
! pip install -q kaggle
! mkdir ~/.kaggle
! mv kaggle.json ~/.kaggle/
! chmod 600 ~/.kaggle/kaggle.json
!kaggle datasets download -d clorichel/boat-types-recognition
Downloading boat-types-recognition.zip to /content
99% 838M/842M [00:08<00:00, 109MB/s]
100% 842M/842M [00:08<00:00, 100MB/s]
! mkdir data
! unzip -q boat-types-recognition.zip -d data/
# fixing something wrong with the folders.
! rm -R data/buoy/ & rm -R data/cruise\ ship & rm -R data/ferry\ boat \
& rm -R data/freight\ boat & rm -R data/gondola/ & rm -R data/inflatable\ boat \
& rm -R data/kayak/ & rm -R data/paper\ boat & rm -R data/sailboat/
! mkdir models
4.0 Exploring Dataset and Visualize images
Firstly we have to explore our dataset and get some insight about the problem we want to solve.
PATH = r"data/boats"
MODEL_FILE_PATH = r'models/'
categories = glob(PATH+"/*")
for cat in categories:
os.replace(cat, cat.replace(" ", "_"))
categories = glob(PATH+"/*")
categories
['data/boats/freight_boat',
'data/boats/kayak',
'data/boats/paper_boat',
'data/boats/cruise_ship',
'data/boats/inflatable_boat',
'data/boats/sailboat',
'data/boats/ferry_boat',
'data/boats/gondola',
'data/boats/buoy']
df_boat = pd.DataFrame([], columns=["category", "filepath"])
for c in categories:
df_tmp = pd.DataFrame({"category": c.split('/')[-1], "filepath": glob(c+"/*")})
df_boat = pd.concat([df_boat, df_tmp])
df_boat.head()
| category | filepath | |
|---|---|---|
| 0 | freight_boat | data/boats/freight_boat/port-loading-dischargi... |
| 1 | freight_boat | data/boats/freight_boat/life-beauty-scene-tran... |
| 2 | freight_boat | data/boats/freight_boat/freight-liner-ship-lin... |
| 3 | freight_boat | data/boats/freight_boat/sluice-system-lock-314... |
| 4 | freight_boat | data/boats/freight_boat/crane-swimming-boat-ha... |
As you can see from the graph bellow, this dataset contains 1,462 pictures of boats of different types: sailboats, kayaks, gondolas, cruise ships, ferry boats, buoys, paper boats, freight boats and inflatable boats. Our goal is to create a model where we can feed it with a boat image and classified it into one of the main boat category.
df_boat.shape
(1462, 2)
df_boat_agg = df_boat.groupby("category").agg({"filepath":"count"}).sort_values("filepath",ascending=False).reset_index()
plt.get_cmap
# Figure Size
fig = plt.figure(figsize =(14, 7))
col_map = plt.get_cmap('Paired')
# creating the bar plot
plt.bar(df_boat_agg["category"], df_boat_agg["filepath"], color = col_map.colors,
width = 0.4)
plt.xlabel("Category")
plt.ylabel("No. of boats")
plt.title("Count boats from each category")
plt.show()
![]()
There are some categories that don’t have many samples, such as freight and inflatable boat. These categories are going to be dismmissed, because they are not representative of the population being modeled, leading to biased predictions. So, we are going to keep only the first five main categories.
As an alternative experiment. we tried to train a model using the whole set, but we haven’t had a good performance on those categorias with only a few samples.
width = []
height = []
for path in tqdm(df_boat["filepath"]):
im = Image.open(path)
im = np.asarray(im) # convert to numpy array to get dim because jpge images don't have size attribute
height.append(im.shape[0])
width.append(im.shape[1])
df_boat["height"] = height
df_boat["width"] = width
0%| | 0/1462 [00:00<?, ?it/s]
In the histogram below, we can also look the size distribution. Most images have a width that goes from 1200 px to 1400 px, but they have a high variance regarding to Height, that goes from around 500 px to 1400 px.
# set a grey background (use sns.set_theme() if seaborn version 0.11.0 or above)
sns.set(style="darkgrid")
sns.distplot(df_boat["height"], color="skyblue", label="Height", hist=False, kde=True)
sns.distplot(df_boat["width"], color="red", label="Width", hist=False, kde=True)
plt.legend()
plt.show()
![]()
Imagenet models need an input size of 224 x 224 so one of the preprocessing steps will be to resize the images. Preprocessing is also where we will implement data augmentation for our training data.
Let’s check some images from the dataset
fig = plt.figure(figsize=(15, 15))
rows, columns = 3, 3
for cnc, cat in enumerate(df_boat.category.unique()):
filepath = df_boat[df_boat["category"]==cat]["filepath"].sample(n=2).values[0]
im = Image.open(filepath)
fig.add_subplot(rows, columns, cnc+1)
# showing image
plt.imshow(im)
# showing image
plt.axis('off')
plt.title(cat)
plt.tight_layout()
![]()
# Filtering classes. From here, we are going to work only with the main classes
boat_filter = df_boat.groupby("category").agg({"filepath": "count"}).sort_values("filepath", ascending=False)[:5].index.tolist()
df_boat = df_boat[df_boat["category"].isin(boat_filter)]
5.0 split dataset into train/val/test
In order to train our deep learning models, we need to create the required directory structure for our images. Right now, our data directory structure looks like this:
! tree -d {PATH}
data/boats
├── buoy
├── cruise_ship
├── ferry_boat
├── freight_boat
├── gondola
├── inflatable_boat
├── kayak
├── paper_boat
└── sailboat
9 directories
We need our images to be contained in 3 folders train, val and test. We will then train on the images in train dataset, validate on the ones in the val dataset and finally test them on images in the test dataset. Lets do this by splitting a dataset on train/val/test using the function train_test_splitand then we will create 3 folders for each subset where they will be filled with their own correspondent images.
X_train, X_test, _, _ = train_test_split(
df_boat, df_boat['category'],stratify=df_boat['category'], test_size=0.4, random_state=38)
X_test, X_val, _, _ = train_test_split(
X_test, X_test['category'], stratify=X_test['category'], test_size=0.5, random_state=38)
X_train["type"] = "train"
X_test["type"] = "test"
X_val["type"] = "val"
df_boat = pd.concat([X_train, X_test, X_val])
if os.path.exists(f"{os.path.join(PATH.split('/')[0], 'train')}"):
shutil.rmtree(f"{os.path.join(PATH.split('/')[0], 'train')}")
if os.path.exists(f"{os.path.join(PATH.split('/')[0], 'test')}"):
shutil.rmtree(f"{os.path.join(PATH.split('/')[0], 'test')}")
if os.path.exists(f"{os.path.join(PATH.split('/')[0], 'val')}"):
shutil.rmtree(f"{os.path.join(PATH.split('/')[0], 'val')}")
os.mkdir(f"{os.path.join(PATH.split('/')[0], 'train')}")
os.mkdir(f"{os.path.join(PATH.split('/')[0], 'test')}")
os.mkdir(f"{os.path.join(PATH.split('/')[0], 'val')}")
for cat in df_boat.category.unique():
os.makedirs(f"{os.path.join(PATH.split('/')[0], 'train', cat)}", exist_ok=True)
os.makedirs(f"{os.path.join(PATH.split('/')[0], 'test', cat)}", exist_ok=True)
os.makedirs(f"{os.path.join(PATH.split('/')[0], 'val', cat)}", exist_ok=True)
for i, row in df_boat.iterrows():
type = row["type"]
cat = row["category"]
path = row["filepath"]
os.system(f"cp {path} {os.path.join(PATH.split('/')[0], type, cat, path.split('/')[-1])}")
At the end, you will get something like this:
! tree -d data
data
├── boats
│ ├── buoy
│ ├── cruise_ship
│ ├── ferry_boat
│ ├── freight_boat
│ ├── gondola
│ ├── inflatable_boat
│ ├── kayak
│ ├── paper_boat
│ └── sailboat
├── test
│ ├── buoy
│ ├── cruise_ship
│ ├── ferry_boat
│ ├── freight_boat
│ ├── gondola
│ ├── inflatable_boat
│ ├── kayak
│ ├── paper_boat
│ └── sailboat
├── train
│ ├── buoy
│ ├── cruise_ship
│ ├── ferry_boat
│ ├── freight_boat
│ ├── gondola
│ ├── inflatable_boat
│ ├── kayak
│ ├── paper_boat
│ └── sailboat
└── val
├── buoy
├── cruise_ship
├── ferry_boat
├── freight_boat
├── gondola
├── inflatable_boat
├── kayak
├── paper_boat
└── sailboat
40 directories
6.0 Preprocessing
6.1 Transform
In order to use our images with a network trained on the Imagenet dataset, we need to preprocess our images in the same way as the Imagenet network. Subsequently to do that, we need to rescale the images to 224×224 and normalize them. Using torchvision transforms library then we can to do it.
6.2 Data Augmentation
The idea of data augmentation is to artificially increase the number of training images that our model sees by applying random transformations to the images. For example, we can randomly rotate or crop the images or flip them horizontally. We want our model to distinguish the objects regardless of orientation and data augmentation and can also make a model invariant to transformations of the input data.
Both operations are done sequentially. We have defined a dict to store each transformation functions subset.
# Image transformations
image_transforms = {
# Train uses data augmentation
'train':
transforms.Compose([
transforms.RandomResizedCrop(size=256, scale=(0.8, 1.0)),
transforms.RandomRotation(degrees=15),
transforms.ColorJitter(),
transforms.RandomHorizontalFlip(),
transforms.CenterCrop(size=224), # Image net standards
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406],
[0.229, 0.224, 0.225]) # Imagenet standards
]),
# Validation does not use augmentation
'val':
transforms.Compose([
transforms.Resize(size=256),
transforms.CenterCrop(size=224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406],
[0.229, 0.224, 0.225])
]),
# Validation does not use augmentation
'test':
transforms.Compose([
transforms.Resize(size=256),
transforms.CenterCrop(size=224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406],
[0.229, 0.224, 0.225])
])
}
Here is an example of the train transforms applied to an image in the training dataset. Not only do we get a lot of different images from a single image, but it also helps our network become invariant to the object orientation.
def imshow_tensor(tensor):
# define a transform to convert a tensor to PIL image
transform = transforms.ToPILImage()
# convert the tensor to PIL image using above transform and display the PIL image
plt.imshow(transform(tensor))
cat = "sailboat"
filepath = df_boat[df_boat["category"]==cat]["filepath"].sample(n=2).values[0]
im = Image.open(filepath)
t = image_transforms['train']
fig = plt.figure(figsize=(20, 20))
rows, columns = 3, 3
for cnc in range(9):
fig.add_subplot(rows, columns, cnc+1)
if cnc == 0:
plt.imshow(im)
# showing image
plt.axis('off')
plt.title("original image")
else:
im_transformed = t(im)
imshow_tensor(im_transformed)
# showing image
plt.axis('off')
plt.title(f"Transformation number {cnc} to original image")
plt.tight_layout()
![]()
7.0 DataLoaders
The next step is to provide the training, validation, and test dataset locations to PyTorch. We can do this by using the PyTorch datasets and DataLoader class. This part of the code will mostly remain the same if we have our data in the required directory structures. These dataloaders help us to iterate through the dataset.
train_dataset = datasets.ImageFolder(root=os.path.join(PATH.split('/')[0], 'train'), transform=image_transforms['train'])
val_dataset = datasets.ImageFolder(root=os.path.join(PATH.split('/')[0], 'val'), transform=image_transforms['val'])
test_dataset = datasets.ImageFolder(root=os.path.join(PATH.split('/')[0], 'test'), transform=image_transforms['test'])
image_datasets = {"train": train_dataset, "val": val_dataset, "test": test_dataset}
class_names = image_datasets['train'].classes
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'val', 'test']}
BATCH_SIZE = 128
train_dataloader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=4)
val_dataloader = DataLoader(val_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=4)
test_dataloader = DataLoader(test_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=4)
dataloaders = {"train": train_dataloader, "val": val_dataloader, "test": test_dataloader}
8.0 Training the model
Now, let’s write a general function to train a model.
def train_model(model, criterion, optimizer, scheduler, num_epochs=25):
"""Train a PyTorch Model
Params
--------
model (PyTorch model): cnn to train
criterion (PyTorch loss): objective to minimize
optimizer (PyTorch optimizier): optimizer to compute gradients of model parameters
scheduler
n_epochs (int): maximum number of training epochs
Returns
--------
model (PyTorch model): trained cnn with best weights
history (DataFrame): history of train and validation loss and accuracy
"""
since = time.time()
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
history = [] # keep track of training and validation loss each epoch
for epoch in range(num_epochs):
print(f'Epoch {epoch}/{num_epochs - 1}')
print('-' * 10)
# Each epoch has a training and validation phase
for phase in ['train', 'val']:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
running_corrects = 0
# Iterate over data.
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
# zero the parameter gradients
optimizer.zero_grad()
# forward
# track history if only in train
with torch.set_grad_enabled(phase == 'train'):
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
loss = criterion(outputs, labels)
# backward + optimize only if in training phase
if phase == 'train':
loss.backward()
optimizer.step()
# statistics
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
if phase == 'train':
scheduler.step()
# Calculate average losses
epoch_loss = running_loss / dataset_sizes[phase]
# Calculate average accuracy
epoch_acc = running_corrects.double() / dataset_sizes[phase]
print(f'{phase} Loss: {epoch_loss:.4f} Acc: {epoch_acc:.4f}')
history.append([epoch_loss, epoch_acc.item(), phase])
# deep copy the model
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
print()
time_elapsed = time.time() - since
print(f'Training complete in {time_elapsed // 60:.0f}m {time_elapsed % 60:.0f}s')
print(f'Best val Acc: {best_acc:4f}')
# Format history
history = pd.DataFrame(
history,
columns=[
'epoch_loss', 'epoch_acc',
'phase'
])
# load best model weights
model.load_state_dict(best_model_wts)
return model, history
8.1 Check for GPU device
To accelerate operations in the neural network, we move it to the GPU or MPS if available.
# Whether to train on a gpu
device = 'cuda' if torch.cuda.is_available() else 'cpu'
print('Using {} device'.format(device))
Using cuda device
8.2 ResNet
Before we get straight into training our models, let’s see a little bit what a ResNet deep learning architecture is.
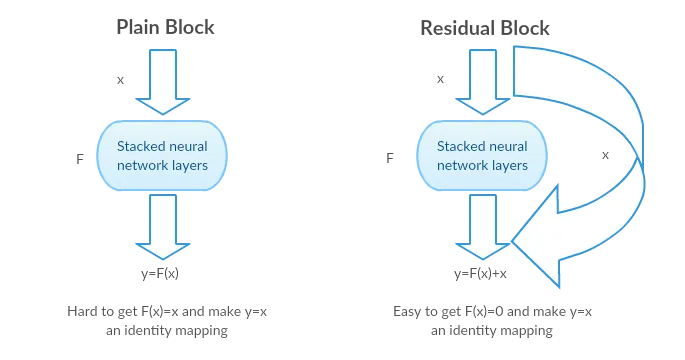
A residual network, or ResNet for short, is an artificial neural network that helps to build deeper neural network by utilizing skip connections or shortcuts to jump over some layers. You’ll see how skipping helps build deeper network layers without falling into the problem of vanishing gradients.
There are different versions of ResNet, including ResNet-18, ResNet-34, ResNet-50, and so on. The numbers denote layers, although the architecture is the same.
To create a residual block, add a shortcut to the main path in the plain neural network, as shown in the figure below.
8.3 Transfer Learning
The main idea here is taking the ConvNet trained, chop off the last layer(s), retrain the models last layer(s) on a different dataset. Intuitively, you’re retraining the model to recognized different higher level features. As a result, training time gets cut down a lot so transfer learning is a helpful tool when you don’t have enough data or if training takes too much resources as in our case.
8.4 Finetuning the ConvNet
The main idea here, is training every layer but not from a random initialization starting point, but from a pretrained network.
First of all, we load our pretrained model. As we’ve mentioned before, we use resnet50, but other models can effectively be used too.
8.4.1 Load and setup ResNet
model_ft = models.resnet50(pretrained=True)
print(model_ft)
Downloading: "https://download.pytorch.org/models/resnet50-0676ba61.pth" to /root/.cache/torch/hub/checkpoints/resnet50-0676ba61.pth
100%|██████████| 97.8M/97.8M [00:01<00:00, 69.3MB/s]
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=2048, out_features=1000, bias=True)
)
We need to replace the linear classification layer output of the model by our custom classifier. As you can see from the printed model structure bellow, there is a final linear layer with 2048 inputs and 1000 outputs that we are going to remove and replace for our customs layer.
n_classes = df_boat.category.nunique()
n_inputs = model_ft.fc.in_features
model_ft.fc = nn.Sequential(
nn.Linear(n_inputs, 256),
nn.ReLU(),
nn.Dropout(0.4),
nn.Linear(256, n_classes),
nn.LogSoftmax(dim=1))
Above you can see how many parameters are needed to train to fine-tune the ResNet.
# Find total parameters and trainable parameters
total_params = sum(p.numel() for p in model_ft.parameters())
print(f'{total_params:,} total parameters.')
total_trainable_params = sum(
p.numel() for p in model_ft.parameters() if p.requires_grad)
print(f'{total_trainable_params:,} training parameters.')
24,033,861 total parameters.
24,033,861 training parameters.
One of the most important things when you are training any model is to chouse the loss-function and the optimizer used. Here, we’ve used categorical cross-entropy as we have got a multiclass classification problem and the SGD optimizer, which is one of the most commonly used optimizer.
Beside this, we’ve set up a schedule to make learning rate adaptable to the gradient descent optimization procedure, in order to increase performance and reduce training time.
model_ft = model_ft.to(device)
criterion = nn.CrossEntropyLoss()
# Observe that all parameters are being optimized
optimizer_ft = optim.SGD(model_ft.parameters(), lr=0.001, momentum=0.9)
# Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = optim.lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
8.4.2 Train and evaluate
Here we pass the parameters to the function train_model we’ve defined above. It should take around 10-15 min on GPU (K4). On CPU though, it takes far more time than that.
model_ft, log_ft = train_model(model_ft, criterion, optimizer_ft, exp_lr_scheduler,
num_epochs=24)
Epoch 0/23
----------
train Loss: 1.6330 Acc: 0.1573
val Loss: 1.5606 Acc: 0.3870
Epoch 1/23
----------
train Loss: 1.5269 Acc: 0.3824
val Loss: 1.4446 Acc: 0.3755
Epoch 2/23
----------
train Loss: 1.4190 Acc: 0.3913
val Loss: 1.3562 Acc: 0.3755
Epoch 3/23
----------
train Loss: 1.3446 Acc: 0.4182
val Loss: 1.2710 Acc: 0.4138
Epoch 4/23
----------
train Loss: 1.2543 Acc: 0.5128
val Loss: 1.1846 Acc: 0.6092
Epoch 5/23
----------
train Loss: 1.1803 Acc: 0.5921
val Loss: 1.0915 Acc: 0.6705
Epoch 6/23
----------
train Loss: 1.0799 Acc: 0.6905
val Loss: 0.9888 Acc: 0.7471
Epoch 7/23
----------
train Loss: 1.0034 Acc: 0.7417
val Loss: 0.9811 Acc: 0.7586
Epoch 8/23
----------
train Loss: 1.0048 Acc: 0.7379
val Loss: 0.9676 Acc: 0.7625
Epoch 9/23
----------
train Loss: 0.9807 Acc: 0.7532
val Loss: 0.9612 Acc: 0.7739
Epoch 10/23
----------
train Loss: 0.9770 Acc: 0.7468
val Loss: 0.9513 Acc: 0.7778
Epoch 11/23
----------
train Loss: 0.9582 Acc: 0.7685
val Loss: 0.9402 Acc: 0.7893
Epoch 12/23
----------
train Loss: 0.9510 Acc: 0.7724
val Loss: 0.9247 Acc: 0.7931
Epoch 13/23
----------
train Loss: 0.9465 Acc: 0.7839
val Loss: 0.9110 Acc: 0.8008
Epoch 14/23
----------
train Loss: 0.9326 Acc: 0.7826
val Loss: 0.9135 Acc: 0.8008
Epoch 15/23
----------
train Loss: 0.9446 Acc: 0.7916
val Loss: 0.9119 Acc: 0.8008
Epoch 16/23
----------
train Loss: 0.9288 Acc: 0.7839
val Loss: 0.9140 Acc: 0.8008
Epoch 17/23
----------
train Loss: 0.9182 Acc: 0.7839
val Loss: 0.9110 Acc: 0.7969
Epoch 18/23
----------
train Loss: 0.9171 Acc: 0.7903
val Loss: 0.9061 Acc: 0.8008
Epoch 19/23
----------
train Loss: 0.9303 Acc: 0.7788
val Loss: 0.9096 Acc: 0.7969
Epoch 20/23
----------
train Loss: 0.9389 Acc: 0.7749
val Loss: 0.9101 Acc: 0.8008
Epoch 21/23
----------
train Loss: 0.9265 Acc: 0.7877
val Loss: 0.9111 Acc: 0.8008
Epoch 22/23
----------
train Loss: 0.9357 Acc: 0.7711
val Loss: 0.9084 Acc: 0.8046
Epoch 23/23
----------
train Loss: 0.9242 Acc: 0.7967
val Loss: 0.9110 Acc: 0.8046
Training complete in 13m 51s
Best val Acc: 0.804598
8.4.3 Training log
From the training log we can see the validation accuracy started at ~38% in the first epoch, and we ended up with a validation accuracy of ~80%. Which is not bad at all.
And here are the training curves showing the loss and accuracy metrics:
def plot_loss(history):
plt.figure(figsize=(8, 6))
epochs = [e for e in range(0, len(history[history["phase"]=="train"]))]
plt.plot(epochs,
history[history["phase"]=="train"]["epoch_loss"], label="train_loss")
plt.plot(epochs,
history[history["phase"]=="val"]["epoch_loss"], label="valid_loss")
plt.legend()
plt.xlabel('Epoch')
plt.ylabel('Average Negative Log Likelihood')
plt.title('Training and Validation Losses')
plot_loss(log_ft)
![]()
def plot_acc(history):
plt.figure(figsize=(8, 6))
epochs = [e for e in range(0, len(history[history["phase"]=="train"]))]
plt.plot(epochs,
history[history["phase"]=="train"]["epoch_acc"], label="train_acc")
plt.plot(epochs,
history[history["phase"]=="val"]["epoch_acc"], label="valid_acc")
plt.legend()
plt.xlabel('Epoch')
plt.ylabel('Average Accuracy')
plt.title('Training and Validation Accuracy')
plot_acc(log_ft)
![]()
You can see that from epoch 4 validation accuracy has became higher than train accuracy, meaning that we are not overfitting our model.
8.4.4 Save model
torch.save(model_ft.state_dict(), os.path.join(MODEL_FILE_PATH, 'resnet50_ft_weights.pth'))
8.5 ConvNet as fixed feature extractor
Here, it’s needed to freeze all the network except the final layer. We have to set requires_grad = False to freeze the parameters so that the gradients are not computed in backward().
8.5.1 Load and setup ResNet
model_conv = models.resnet50(pretrained=True)
for param in model_conv.parameters():
param.requires_grad = False
model_conv.fc = nn.Sequential(
nn.Linear(n_inputs, 256),
nn.ReLU(),
nn.Dropout(0.4),
nn.Linear(256, n_classes),
nn.LogSoftmax(dim=1))
As a result, we don’t need to train all layers, just the last ones we’ve replaced with random weights. In theory, it should take less time to train it.
# Find total parameters and trainable parameters
total_params = sum(p.numel() for p in model_conv.parameters())
print(f'{total_params:,} total parameters.')
total_trainable_params = sum(
p.numel() for p in model_conv.parameters() if p.requires_grad)
print(f'{total_trainable_params:,} training parameters.')
24,033,861 total parameters.
525,829 training parameters.
model_conv = model_conv.to(device)
criterion = nn.CrossEntropyLoss()
# Observe that only parameters of final layer are being optimized as
# opposed to before.
optimizer_conv = optim.SGD(model_conv.fc.parameters(), lr=0.001, momentum=0.9)
# Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = optim.lr_scheduler.StepLR(optimizer_conv, step_size=7, gamma=0.1)
8.5.2 Train and evaluate
model_conv, log_conv = train_model(model_conv, criterion, optimizer_conv,
exp_lr_scheduler, num_epochs=24)
Epoch 0/23
----------
train Loss: 1.5972 Acc: 0.2954
val Loss: 1.5394 Acc: 0.3870
Epoch 1/23
----------
train Loss: 1.5119 Acc: 0.3760
val Loss: 1.4599 Acc: 0.3755
Epoch 2/23
----------
train Loss: 1.4519 Acc: 0.3760
val Loss: 1.4031 Acc: 0.3755
Epoch 3/23
----------
train Loss: 1.4015 Acc: 0.3811
val Loss: 1.3520 Acc: 0.3755
Epoch 4/23
----------
train Loss: 1.3482 Acc: 0.3939
val Loss: 1.3024 Acc: 0.4176
Epoch 5/23
----------
train Loss: 1.3105 Acc: 0.4361
val Loss: 1.2533 Acc: 0.4828
Epoch 6/23
----------
train Loss: 1.2672 Acc: 0.5013
val Loss: 1.2069 Acc: 0.6207
Epoch 7/23
----------
train Loss: 1.2301 Acc: 0.5742
val Loss: 1.2027 Acc: 0.6284
Epoch 8/23
----------
train Loss: 1.2351 Acc: 0.5767
val Loss: 1.1980 Acc: 0.6284
Epoch 9/23
----------
train Loss: 1.2182 Acc: 0.6023
val Loss: 1.1902 Acc: 0.6245
Epoch 10/23
----------
train Loss: 1.2179 Acc: 0.5870
val Loss: 1.1861 Acc: 0.6398
Epoch 11/23
----------
train Loss: 1.2174 Acc: 0.5997
val Loss: 1.1797 Acc: 0.6513
Epoch 12/23
----------
train Loss: 1.2052 Acc: 0.6010
val Loss: 1.1729 Acc: 0.6552
Epoch 13/23
----------
train Loss: 1.1935 Acc: 0.6330
val Loss: 1.1663 Acc: 0.6590
Epoch 14/23
----------
train Loss: 1.1967 Acc: 0.6087
val Loss: 1.1649 Acc: 0.6552
Epoch 15/23
----------
train Loss: 1.1911 Acc: 0.6304
val Loss: 1.1650 Acc: 0.6552
Epoch 16/23
----------
train Loss: 1.1991 Acc: 0.5997
val Loss: 1.1652 Acc: 0.6475
Epoch 17/23
----------
train Loss: 1.1915 Acc: 0.6036
val Loss: 1.1655 Acc: 0.6552
Epoch 18/23
----------
train Loss: 1.1908 Acc: 0.5972
val Loss: 1.1639 Acc: 0.6628
Epoch 19/23
----------
train Loss: 1.1912 Acc: 0.6061
val Loss: 1.1634 Acc: 0.6628
Epoch 20/23
----------
train Loss: 1.1957 Acc: 0.6010
val Loss: 1.1616 Acc: 0.6667
Epoch 21/23
----------
train Loss: 1.1842 Acc: 0.6125
val Loss: 1.1621 Acc: 0.6705
Epoch 22/23
----------
train Loss: 1.1953 Acc: 0.5985
val Loss: 1.1617 Acc: 0.6705
Epoch 23/23
----------
train Loss: 1.1938 Acc: 0.6023
val Loss: 1.1619 Acc: 0.6667
Training complete in 12m 23s
Best val Acc: 0.670498
7.5.3 Training log
From the training log we can see the validation accuracy started at ~29% in the first epoch, and we ended up with a validation accuracy of ~67%. We’ve got a poor perfomance here.
Here are the training curves showing the loss and accuracy metrics:
plot_loss(log_conv)
![]()
plot_acc(log_conv)
![]()
8.5.4 Save model
torch.save(model_conv.state_dict(), os.path.join(MODEL_FILE_PATH, 'resnet50_conv_weights.pth'))
8.6 Inference
Once we have the model, we can do inferences on individual test images or on the whole test dataset to obtain the test accuracy and confusion matrix to finally evaluate how good our model is. We’ve choosen the first model to evaluate (Finetuning), because it was our winer.
def predict(model, image_file_path):
transform = image_transforms['test']
test_image = Image.open(image_file_path)
plt.imshow(test_image)
test_image_tensor = transform(test_image)
test_image = np.asarray(test_image) # convert to numpy array to get dim because jpge images don't have size attribute
height = test_image.shape[0]
width = test_image.shape[1]
if torch.cuda.is_available():
test_image_tensor = test_image_tensor.view(1, 3, 224, 224).cuda()
else:
test_image_tensor = test_image_tensor.view(1, 3, 224, 224)
with torch.no_grad():
model.eval()
# Model outputs log probabilities
out = model(test_image_tensor)
ps = torch.exp(out)
topk, topclass = ps.topk(1, dim=1)
plt.text((width*0.65) , height*0.07, "Output class: " + class_names[topclass.cpu().numpy()[0][0]],
horizontalalignment='center',
verticalalignment='center',
bbox=dict(facecolor='grey', alpha=0.3), size=24, color="White")
#print("Output class : ", class_names[topclass.cpu().numpy()[0][0]])
plt.axis('off')
model = models.resnet50() # we do not specify weights, i.e. create untrained model
n_inputs = model.fc.in_features
n_classes = df_boat.category.nunique()
model.fc = nn.Sequential(
nn.Linear(n_inputs, 256),
nn.ReLU(),
nn.Dropout(0.4),
nn.Linear(256, n_classes),
nn.LogSoftmax(dim=1))
model.load_state_dict(torch.load(os.path.join(MODEL_FILE_PATH, 'resnet50_ft_weights.pth'), map_location=torch.device(device)))
model.to(device)
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Sequential(
(0): Linear(in_features=2048, out_features=256, bias=True)
(1): ReLU()
(2): Dropout(p=0.4, inplace=False)
(3): Linear(in_features=256, out_features=5, bias=True)
(4): LogSoftmax(dim=1)
)
)
Let’s take some random samples from our test dataset and see how our model classify them.
cat = "kayak"
filepath = df_boat[(df_boat["category"]==cat)]["filepath"].sample(n=2).values[0]
filepath
'data/boats/kayak/paddle-canoeing-kayak-canadians-canadian-812266.jpg'
predict(model,filepath )
![]()
=)
cat = "cruise_ship"
#filepath = df_boat[(df_boat["category"]==cat) & (df_boat["type"]=="test")]["filepath"].sample(n=2).values[0]
filepath = df_boat[(df_boat["category"]==cat)]["filepath"].sample(n=2).values[0]
predict(model,filepath )
![]()
=D
cat = "gondola"
#filepath = df_boat[(df_boat["category"]==cat) & (df_boat["type"]=="test")]["filepath"].sample(n=2).values[0]
filepath = df_boat[(df_boat["category"]==cat)]["filepath"].sample(n=2).values[0]
predict(model,filepath )
![]()
cat = "ferry_boat"
#filepath = df_boat[(df_boat["category"]==cat) & (df_boat["type"]=="test")]["filepath"].sample(n=2).values[0]
filepath = df_boat[(df_boat["category"]==cat)]["filepath"].sample(n=2).values[0]
predict(model,filepath )
![]()
=/
cat = "sailboat"
#filepath = df_boat[(df_boat["category"]==cat) & (df_boat["type"]=="test")]["filepath"].sample(n=2).values[0]
filepath = df_boat[(df_boat["category"]==cat)]["filepath"].sample(n=2).values[0]
predict(model,filepath )
![]()
def plot_confusion_matrix(model, dataloader, normalize=False):
y_pred = []
y_true = []
class_names = list(dataloader.dataset.class_to_idx.keys())
# iterate over test data
for inputs, labels in dataloader:
inputs = inputs.to(device)
labels = labels.to(device)
output = model(inputs) # Feed Network
output = (torch.max(torch.exp(output), 1)[1]).data.cpu().numpy()
y_pred.extend(output) # Save Prediction
labels = labels.data.cpu().numpy()
y_true.extend(labels) # Save Truth
# Build confusion matrix
cf_matrix = confusion_matrix(y_true, y_pred)
acc_val = np.round(np.sum(np.asarray(y_pred) == np.asarray(y_true))/len(y_true), 2)
if normalize:
df_cm = pd.DataFrame(cf_matrix / np.sum(cf_matrix, axis=1)[:, None], index = [i for i in class_names],
columns = [i for i in class_names])
else:
df_cm = pd.DataFrame(cf_matrix, index = [i for i in class_names],
columns = [i for i in class_names])
plt.figure(figsize = (12,7))
sns.heatmap(df_cm, annot=True, linewidth=.3, cmap="Blues")
#add customized title to heatmap
if normalize:
plt.title(f"Confusion matrix, with normalization - Accuracy: {acc_val}", loc='left', size=14)
else:
plt.title(f"Confusion matrix, without normalization - Accuracy: {acc_val}", loc='left', size=14)
pass
As you can see from the confusion matrix bellow, We’ve got a overall accuracy of 84%, that is close to the one we got from our validation. Beside, most classes were well classified by our model, except for the ferry boat. Maybe we need more ferry boats cases and retrain a new model to get a better perfomance.
plot_confusion_matrix(model, test_dataloader)
![]()
9.0 Conclusion
With this project, we ‘ve gone through some concept of transfer learning, an effective method for object recognition. Instead of training a model from scratch, we can use existing architectures that have been trained on a large dataset and then tune them to our task. This reduces the time to train and often results in better overall performance.